HK330 Computer CNC Panel Saw
Produit Video
Computer CNC Panel gesinn HK330
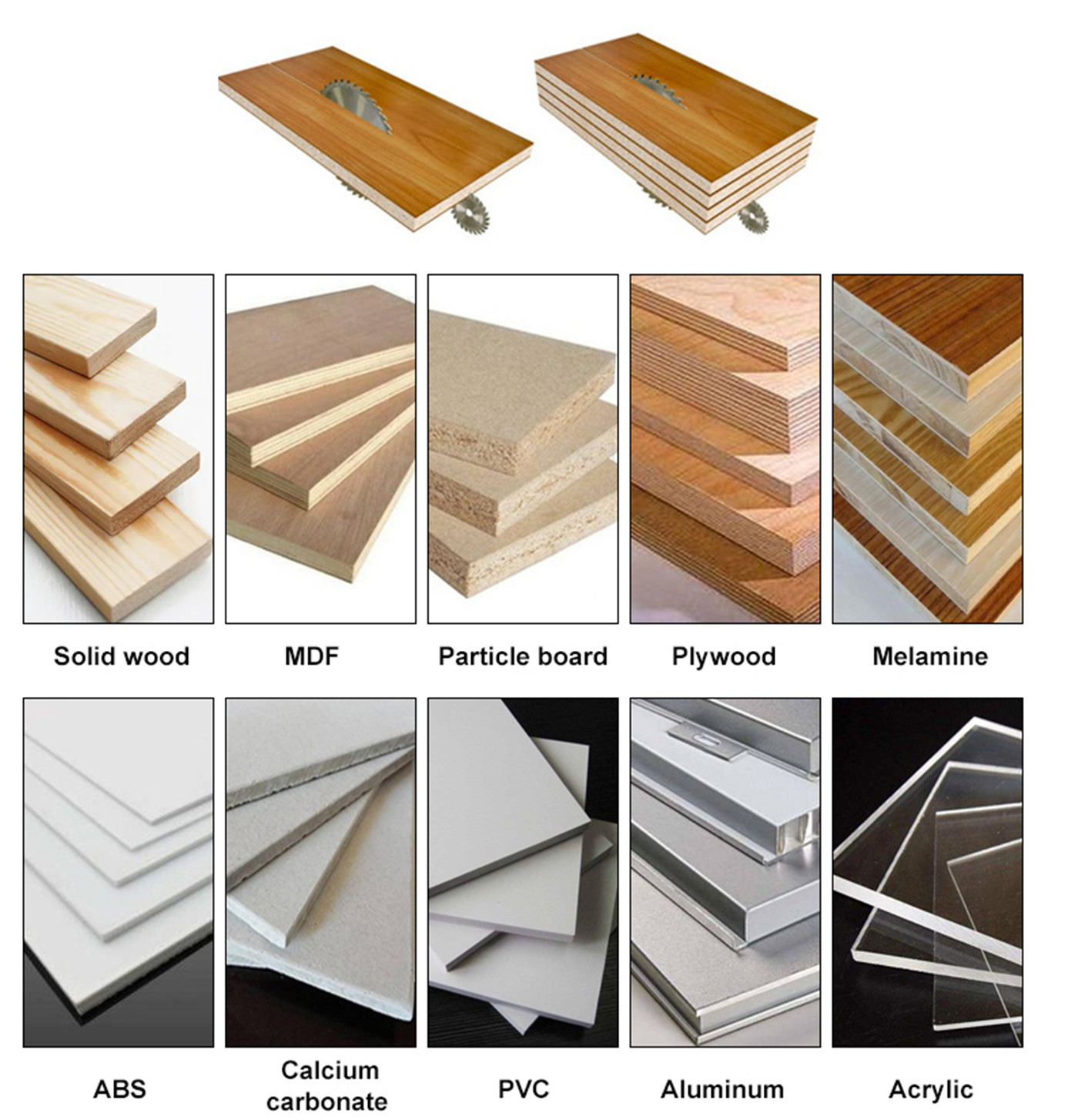
1. Laut der Inputplackbreet, schneiden déi erfuerderlech Plack a séier zréck an den ursprénglechen Aarbechtszoustand.
2. Schneidgeschwindegkeet gëtt duerch Frequenzkonverter kontrolléiert, wat Placke vu verschiddene Dicke a verschiddene Materialien iwwerwanne kann.
3. D'Fütterung adoptéiert pneumatesch schwiewend Perlen Dësch, an de schwéiere Plackmaterial ass einfach ze änneren. De Roboter fiddert automatesch, huet eng niddreg Aarbechtsintensitéit an eng héich Produktiounseffizienz.
4. Benotzt importéiert Delta Servomotor fir kënschtlech Feeler ze eliminéieren an d'Dimensiounsgenauegkeet ze verbesseren.
Technesch Parameteren
| HK 330 | PARAMETER |
| Maximal Schneidgeschwindegkeet | 0-80 m/min |
| Max Carrier Maximal Geschwindegkeet | 100 m/min |
| Main Saw Motor Power | 16,5 kW (optional 18,5 kW) |
| Total Muecht | 26,5 kW (optional 28,5 kW) |
| Maximal Aarbecht Gréisst | 3300L*3300W*100H(mm) Optional 120H(mm) |
| Minimum Aarbecht Gréisst | 34L*45W (mm) |
| Gesamtgréisst | 5300L*5950W*1900H(mm) |

Trefft den Ufuerderunge vun der grousser Plackveraarbechtung, mat enger maximaler Sägegréisst vun 2800 * 2800mm an enger Sägedicke vun 105mm, an enger méi breeder Uwendung

Servo mechanesch clamp Hand 11 eenzege gréissten Design mechanesch Clip

De Roboterarm adoptéiert héichpräzis Wuermgearreduzéierer a Fütterungsstéck, mat enger Schneidgenauegkeet vun ± 0.1mm
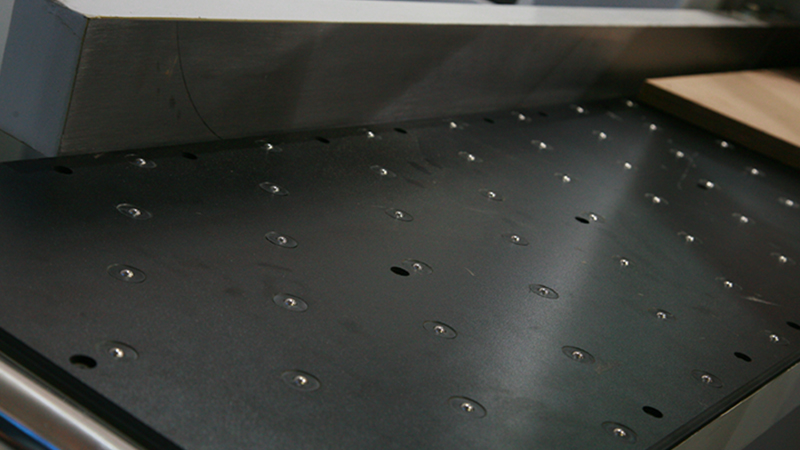
D'Aarbechtsdësch ass aus pneumatesch schwiewend Plattform gemaach
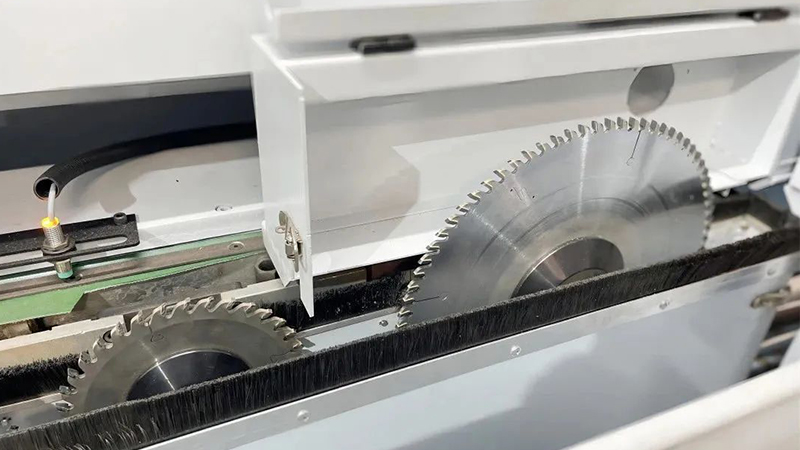
Scoring Saw konnt automatesch gewiesselt ginn no de Bedierfnesser vum Säen. Kooperéiert mat der Haaptsäge fir héichqualitativ Säen
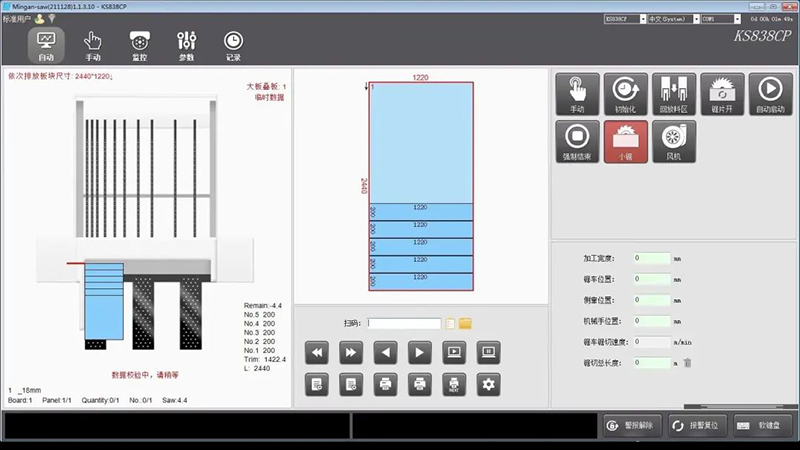
Fakultativ Optimisatioun Software fir automatesch Optimisatioun vun Material Layout an
Prouf